To implement the network reactive obstacle prediction in ns3 has includes to emulate a network, in the environment nodes can enthusiastically modify their features based on the classification and prediction of difficulties in the environment. This is helpful in the scenarios like mobile ad hoc networks (MANETs) or vehicular ad hoc networks (VANETs), where nodes need to respond to fluctuations in their environment to sustain connectivity and performance.
The given below is the detailed procedure on how to implement the reactive obstacle prediction in ns3:
Step-by-Step Implementation:
Step 1: Setup ns3 Environment
Make sure ns3 is installed in the computer.
git clone https://gitlab.com/nsnam/ns-3-dev.git
cd ns-3-dev
./waf configure
./waf build
Step 2: Create the Network Reactive Obstacle Prediction Simulation Script
We will create a script that sets up a network with mobile nodes, simulates the detection of obstacles, and adjusts the node behaviour based on predicted obstacles.
#include “ns3/core-module.h”
#include “ns3/network-module.h”
#include “ns3/internet-module.h”
#include “ns3/point-to-point-module.h”
#include “ns3/mobility-module.h”
#include “ns3/applications-module.h”
#include “ns3/wifi-module.h”
#include “ns3/flow-monitor-module.h”
using namespace ns3;
NS_LOG_COMPONENT_DEFINE(“NetworkReactiveObstaclePredictionExample”);
class ObstacleDetectionApplication : public Application
{
public:
ObstacleDetectionApplication() : m_detected(false) {}
virtual ~ObstacleDetectionApplication() {}
void Setup(Ptr<Node> node, Vector obstaclePosition, double detectionRange)
{
m_node = node;
m_obstaclePosition = obstaclePosition;
m_detectionRange = detectionRange;
}
protected:
virtual void StartApplication(void)
{
m_event = Simulator::Schedule(Seconds(1.0), &ObstacleDetectionApplication::DetectObstacle, this);
}
virtual void StopApplication(void)
{
Simulator::Cancel(m_event);
}
private:
void DetectObstacle()
{
Ptr<MobilityModel> mobility = m_node->GetObject<MobilityModel>();
Vector currentPosition = mobility->GetPosition();
double distance = CalculateDistance(currentPosition, m_obstaclePosition);
if (distance <= m_detectionRange)
{
if (!m_detected)
{
NS_LOG_UNCOND(Simulator::Now().GetSeconds() << “s: Obstacle detected by node at (” << currentPosition.x << “, ” << currentPosition.y << “, ” << currentPosition.z << “)”);
AdjustNodeBehavior();
m_detected = true;
}
}
else
{
m_detected = false;
}
m_event = Simulator::Schedule(Seconds(1.0), &ObstacleDetectionApplication::DetectObstacle, this);
}
void AdjustNodeBehavior()
{
// Implement behavior adjustment logic here, e.g., changing mobility, adjusting power, etc.
Ptr<MobilityModel> mobility = m_node->GetObject<MobilityModel>();
mobility->SetPosition(Vector(m_obstaclePosition.x + 10, m_obstaclePosition.y + 10, m_obstaclePosition.z));
NS_LOG_UNCOND(“Node behavior adjusted due to obstacle prediction.”);
}
Ptr<Node> m_node;
Vector m_obstaclePosition;
double m_detectionRange;
bool m_detected;
EventId m_event;
};
int main(int argc, char *argv[])
{
CommandLine cmd;
cmd.Parse(argc, argv);
// Create nodes
NodeContainer nodes;
nodes.Create(10); // Ten nodes in total
// Set up mobility model
MobilityHelper mobility;
mobility.SetPositionAllocator(“ns3::GridPositionAllocator”,
“MinX”, DoubleValue(0.0),
“MinY”, DoubleValue(0.0),
“DeltaX”, DoubleValue(10.0),
“DeltaY”, DoubleValue(10.0),
“GridWidth”, UintegerValue(5),
“LayoutType”, StringValue(“RowFirst”));
mobility.SetMobilityModel(“ns3::ConstantVelocityMobilityModel”);
mobility.Install(nodes);
// Set initial positions and velocities
for (uint32_t i = 0; i < nodes.GetN(); ++i)
{
Ptr<ConstantVelocityMobilityModel> mobilityModel = nodes.Get(i)->GetObject<ConstantVelocityMobilityModel>();
mobilityModel->SetPosition(Vector(i * 10.0, 0.0, 0.0));
mobilityModel->SetVelocity(Vector(1.0, 1.0, 0.0));
}
// Set up WiFi
WifiHelper wifi;
wifi.SetRemoteStationManager(“ns3::AarfWifiManager”);
WifiMacHelper mac;
Ssid ssid = Ssid(“ns-3-ssid”);
mac.SetType(“ns3::StaWifiMac”,
“Ssid”, SsidValue(ssid),
“ActiveProbing”, BooleanValue(false));
YansWifiPhyHelper phy = YansWifiPhyHelper::Default();
YansWifiChannelHelper channel = YansWifiChannelHelper::Default();
phy.SetChannel(channel.Create());
NetDeviceContainer devices = wifi.Install(phy, mac, nodes);
mac.SetType(“ns3::ApWifiMac”,
“Ssid”, SsidValue(ssid));
NetDeviceContainer apDevices = wifi.Install(phy, mac, nodes.Get(0));
// Install the internet stack
InternetStackHelper stack;
stack.Install(nodes);
// Assign IP addresses
Ipv4AddressHelper address;
address.SetBase(“10.1.1.0”, “255.255.255.0”);
Ipv4InterfaceContainer interfaces = address.Assign(devices);
address.Assign(apDevices);
// Install obstacle detection application on nodes
Vector obstaclePosition(50.0, 50.0, 0.0);
double detectionRange = 20.0;
for (uint32_t i = 0; i < nodes.GetN(); ++i)
{
Ptr<ObstacleDetectionApplication> app = CreateObject<ObstacleDetectionApplication>();
app->Setup(nodes.Get(i), obstaclePosition, detectionRange);
nodes.Get(i)->AddApplication(app);
app->SetStartTime(Seconds(1.0));
app->SetStopTime(Seconds(10.0));
}
// Enable FlowMonitor to measure performance metrics
FlowMonitorHelper flowmon;
Ptr<FlowMonitor> monitor = flowmon.InstallAll();
// Run the simulation
Simulator::Stop(Seconds(15.0));
Simulator::Run();
// Print per-flow statistics
monitor->CheckForLostPackets();
Ptr<Ipv4FlowClassifier> classifier = DynamicCast<Ipv4FlowClassifier>(flowmon.GetClassifier());
std::map<FlowId, FlowMonitor::FlowStats> stats = monitor->GetFlowStats();
for (std::map<FlowId, FlowMonitor::FlowStats>::const_iterator i = stats.begin(); i != stats.end(); ++i)
{
Ipv4FlowClassifier::FiveTuple t = classifier->FindFlow(i->first);
NS_LOG_UNCOND(“Flow ” << i->first << ” (” << t.sourceAddress << ” -> ” << t.destinationAddress << “)”);
NS_LOG_UNCOND(” Tx Packets: ” << i->second.txPackets);
NS_LOG_UNCOND(” Tx Bytes: ” << i->second.txBytes);
NS_LOG_UNCOND(” Rx Packets: ” << i->second.rxPackets);
NS_LOG_UNCOND(” Rx Bytes: ” << i->second.rxBytes);
NS_LOG_UNCOND(” Lost Packets: ” << i->second.lostPackets);
NS_LOG_UNCOND(” Throughput: ” << i->second.rxBytes * 8.0 / (i->second.timeLastRxPacket.GetSeconds() – i->second.timeFirstTxPacket.GetSeconds()) / 1024 / 1024 << ” Mbps”);
}
// Clean up
Simulator::Destroy();
return 0;
}
Step 3: Compile and Run the Simulation
- Compile the Simulation:
./waf configure –enable-examples
./waf build
Run the Simulation:
./waf –run scratch/network-reactive-obstacle-prediction-example
Step 4: Analyse Results
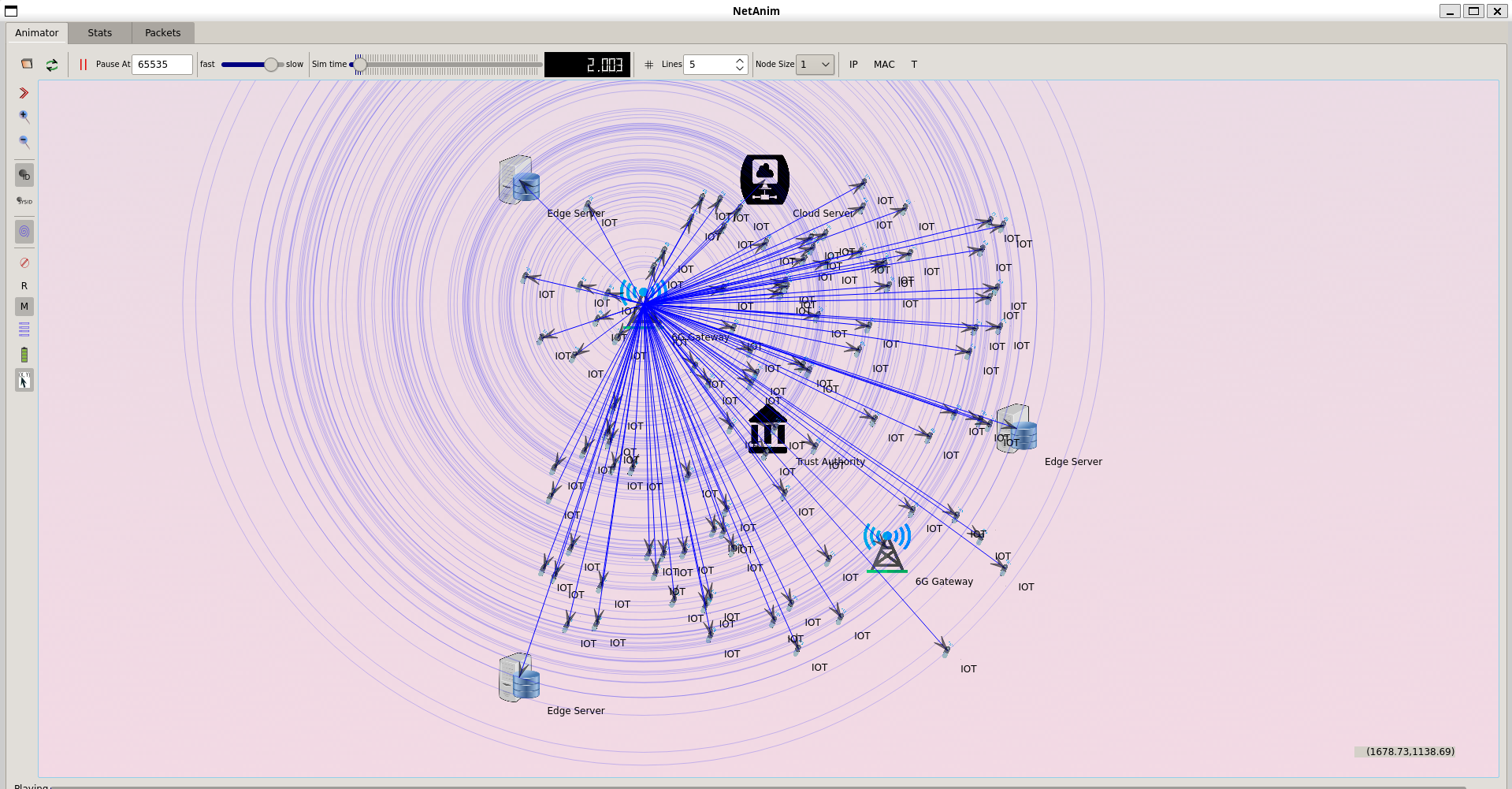
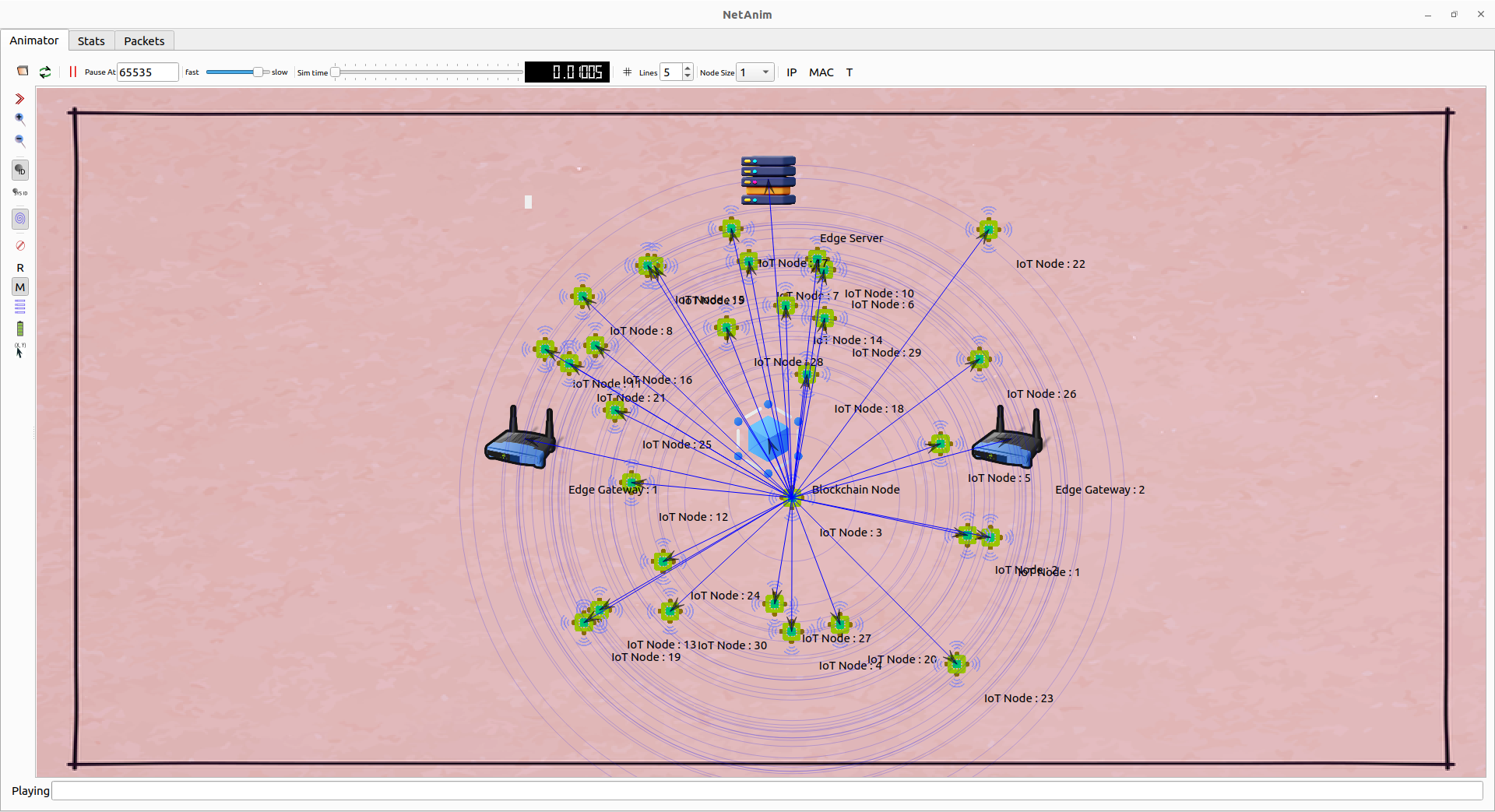
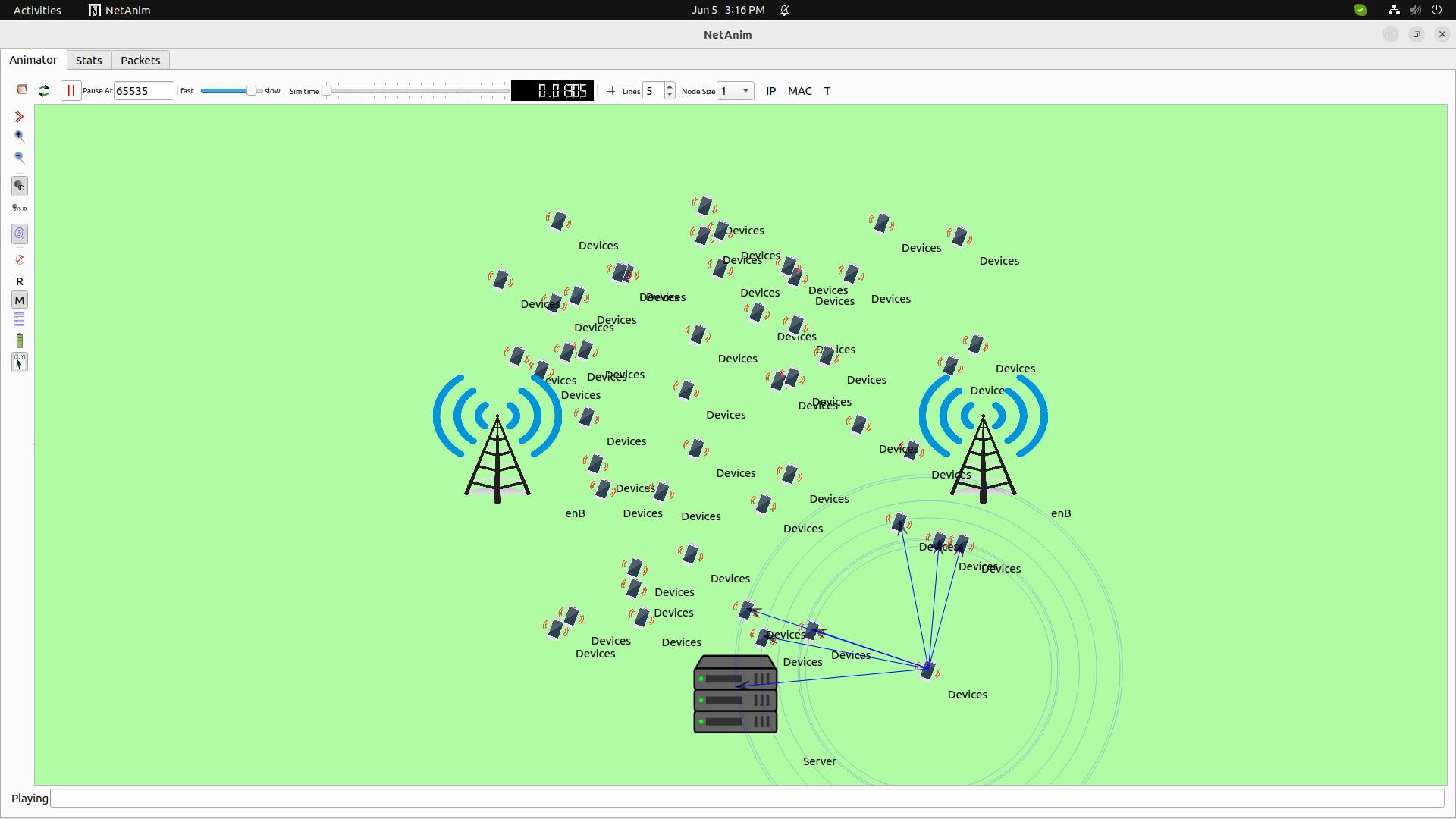
The simulation script sets up a network topology with nodes and applies a custom application to detect and react to obstacles. The application monitors the position of the nodes, detects when they are within a certain range of a predefined obstacle, and adjusts their behavior (e.g., changing their position) accordingly. FlowMonitor is used to collect and print out statistics about the traffic flows, such as packet loss, throughput, and delay.
Additional Considerations
To extend the functionality of your network reactive obstacle prediction simulation, consider the following:
1. Advanced Obstacle Detection
We must implement more sophisticated obstacle detection algorithms to predict the movement and position of obstacles based on past data.
2. Dynamic Mobility Models
Incorporate dynamic mobility models to simulate more realistic movement patterns, such as vehicles in a VANET scenario or drones in a UAV network.
3. Communication Protocols
Integrating the communication protocols that optimize data routing and resource allocation based on the detected obstacles must carried on.
4. Performance Metrics
We will collect and analyse additional metrics such as energy consumption, network latency, and packet delivery ratio to evaluate the performance of the obstacle detection and mitigation algorithms.
5. Real-World Scenarios
Simulate real-world scenarios such as smart cities, industrial IoT deployments, or disaster recovery networks to test the effectiveness of the obstacle detection and mitigation approaches in practical applications.
From this script, we provide and offer the elaborated procedures, sample snippets to complete the performance analysis for network reactive obstacle prediction in ns3 that detect and predict the difficulties in the created scenarios. We plan to give further details with performance analysis support about how the network reactive obstacle prediction will perform in other simulation tools.